AIMM_arquitetura_convencinal

Bin-picking

Captura de ecr├г de 2019-03-24 15-25-41

Captura de ecr├г de 2019-03-24 15-29-12

PCradius

PCvg
ROS_basic_concepts

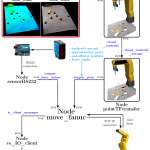
Robot_example_mobileBpicking

Router_asus

action_server_state_transitions

arduino_LEO

arduino_micro

arduino_uno

arduino_uno_laser
arquitetura_manipulador

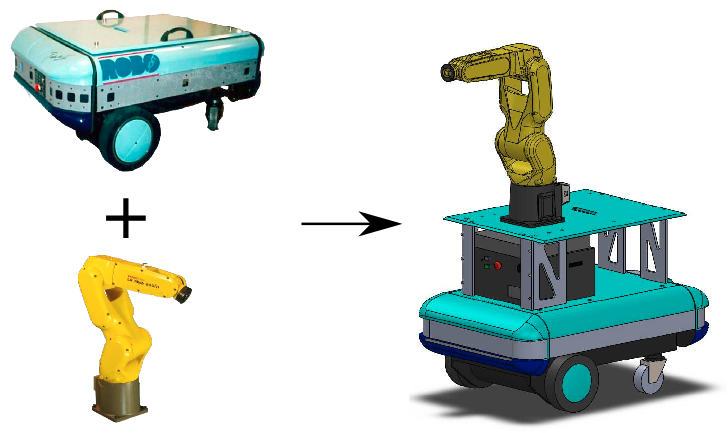
clearpath_solution

colrobot_inesctec
coordsystems_img

diagrama_leitura_encoders
esquema_BinPicking

esquema_ios_vs

exemple_intrinsc_calib

foto_calib_hokuyo

hokuyo_dianteiro

hokuyo_traseiro

hub

inversor

j_mota_img2

kinectsensor

kuka_exemple_mm

l_sarmento_img

laser1D_calibb

melodic

miniPC
montagem1

montagem2

montagem3

moveit_architecture
nice

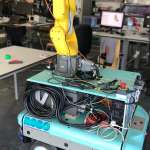
plataforma_robonuc

pos_intrinsc_calib
pos_intrinsc_calibration_nuvem

pre_intrinsc_calib

pre_intrinsc_calibration_nuvem

processo_extrinsc_calib

robo_fanuc_lrmate200id

robot_pose_laser1D_calib

sick_sensor_DT20HI
state_of_the_art_conpilation
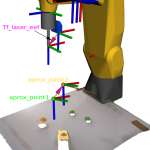
tf_e_aproxpoint

tf_tree_total

trajetoria_navigation_auto

urdf_lasers

urdf_plat_e_manipulador

urdf_platform

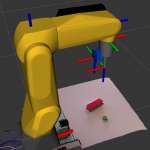
urdf_total

v_vieira_compilacao

vs_compilacao

xbox_controller
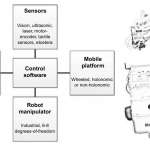
 AIMM_arquitetura_convencinal
AIMM_arquitetura_convencinal
 Bin-picking
Bin-picking
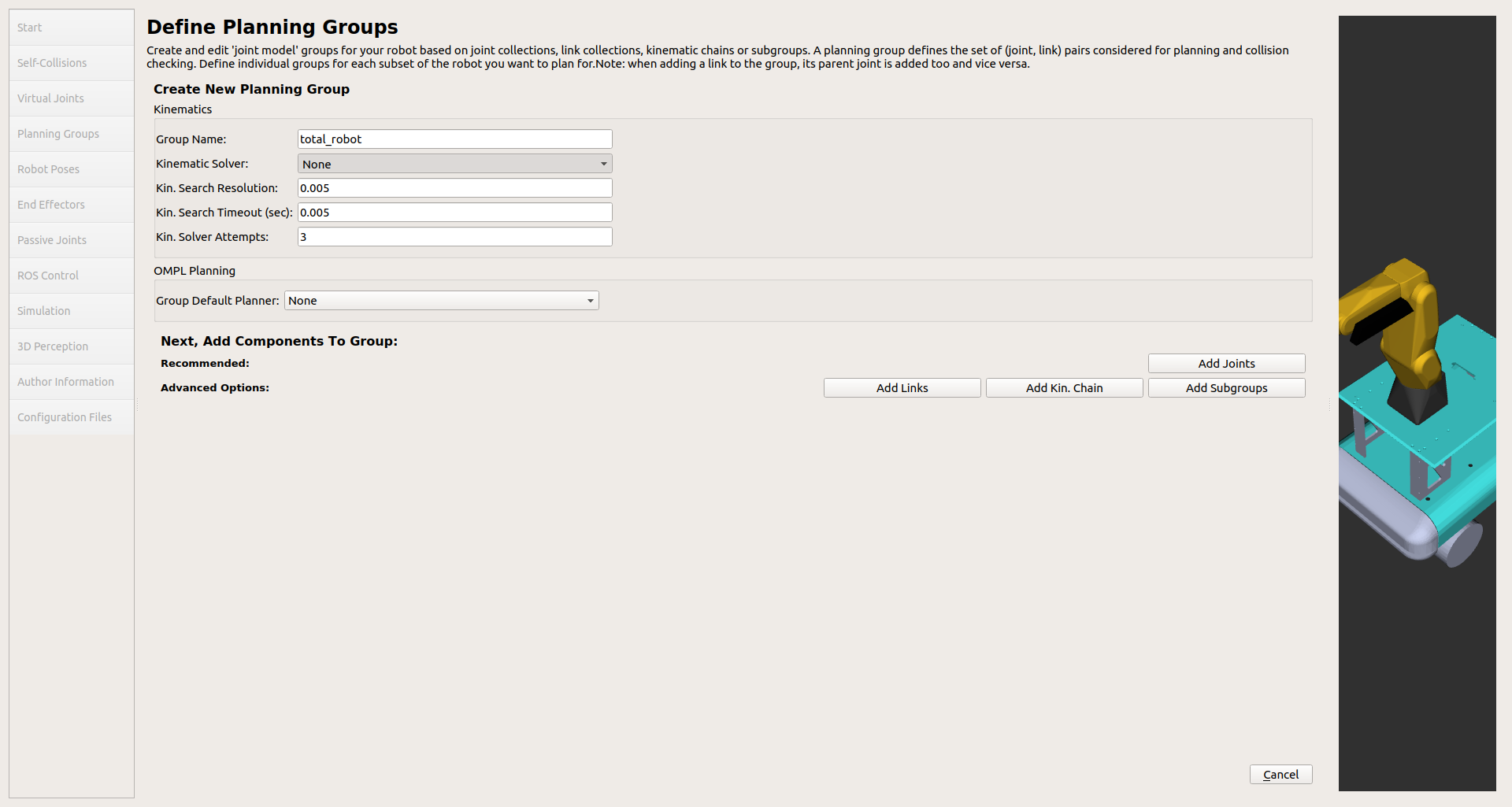 Captura de ecr├г de 2019-03-24 15-25-41
Captura de ecr├г de 2019-03-24 15-25-41
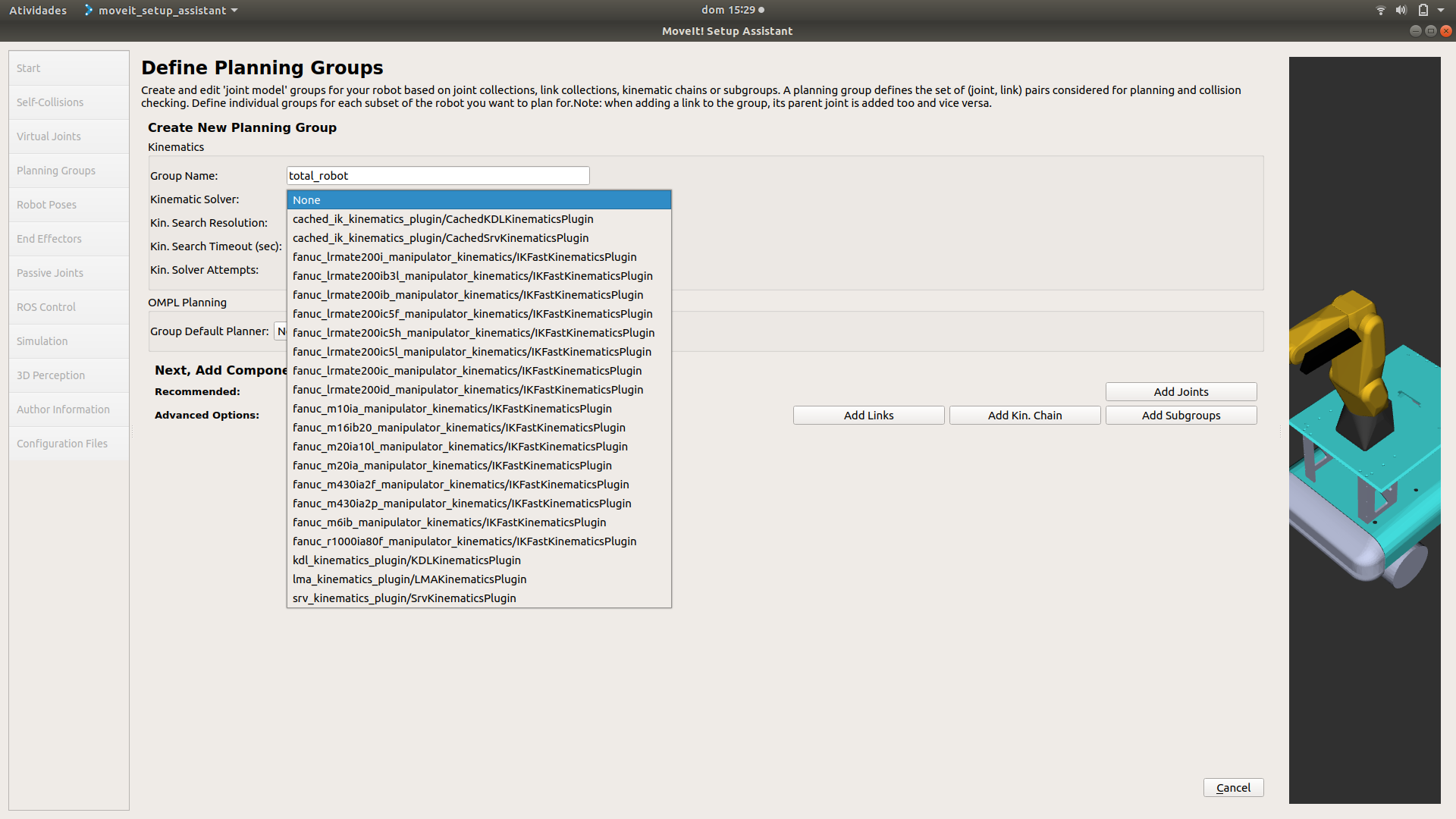 Captura de ecr├г de 2019-03-24 15-29-12
Captura de ecr├г de 2019-03-24 15-29-12
 PCradius
PCradius
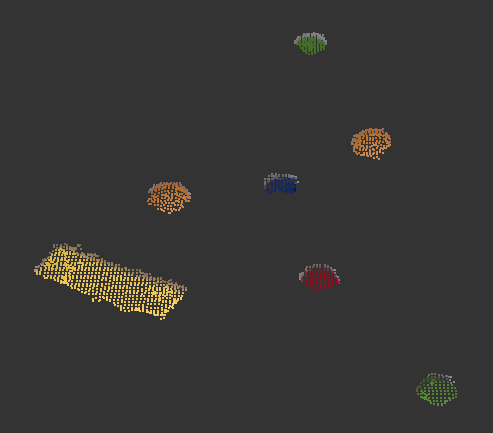
 PCvg
PCvg
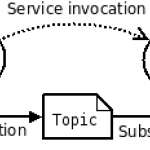
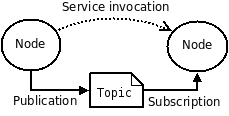 ROS_basic_concepts
ROS_basic_concepts
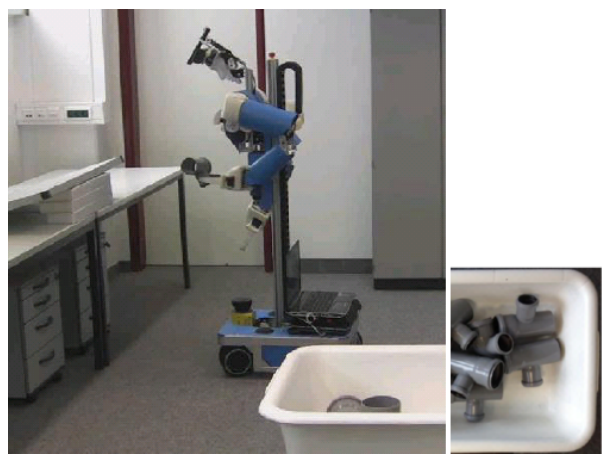 Robot_example_mobileBpicking
Robot_example_mobileBpicking
 Router_asus
Router_asus
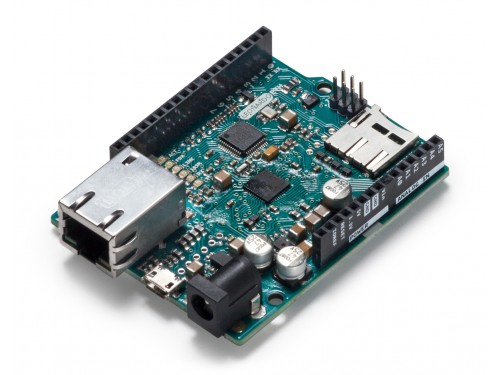 arduino_LEO
arduino_LEO
 arduino_micro
arduino_micro
 arduino_uno
arduino_uno
 arduino_uno_laser
arduino_uno_laser
 arquitetura_manipulador
arquitetura_manipulador
 colrobot_inesctec
colrobot_inesctec
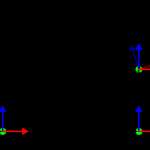
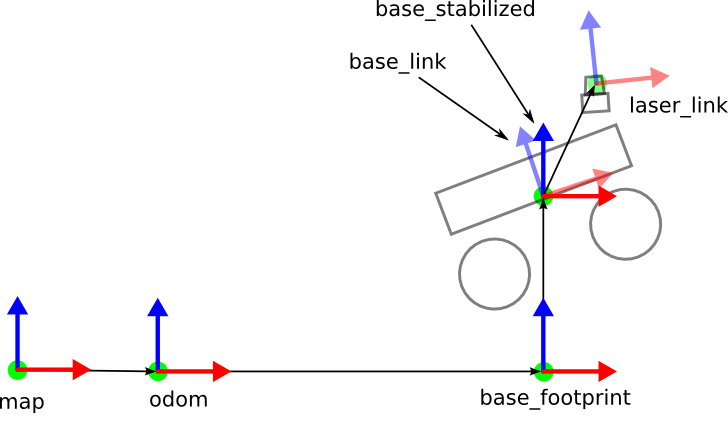 coordsystems_img
coordsystems_img
 diagrama_leitura_encoders
diagrama_leitura_encoders
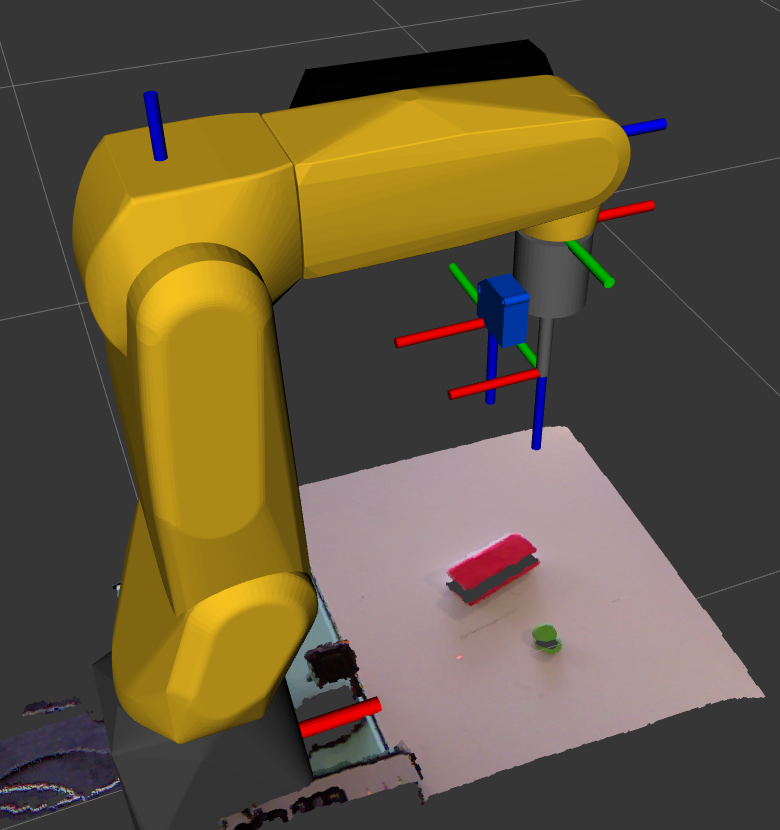
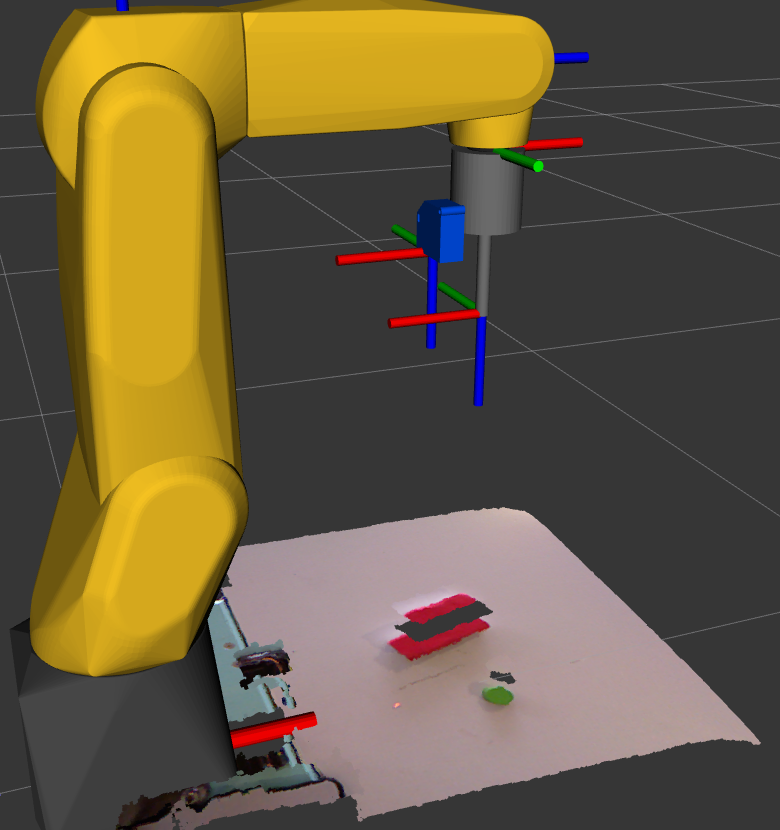
 esquema_BinPicking
esquema_BinPicking
 esquema_ios_vs
esquema_ios_vs
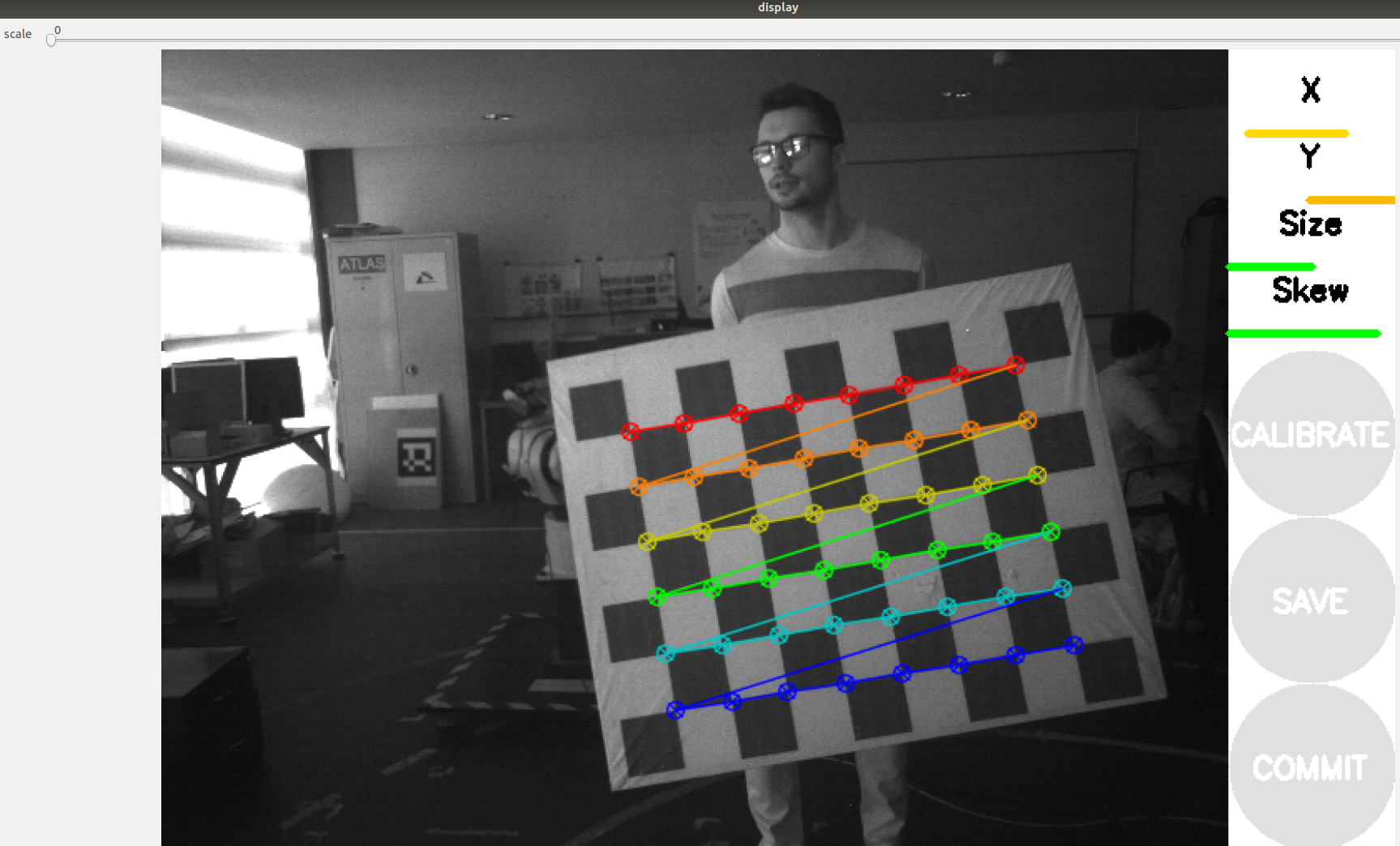 exemple_intrinsc_calib
exemple_intrinsc_calib
 foto_calib_hokuyo
foto_calib_hokuyo
 hokuyo_dianteiro
hokuyo_dianteiro
 hokuyo_traseiro
hokuyo_traseiro
 hub
hub
 inversor
inversor
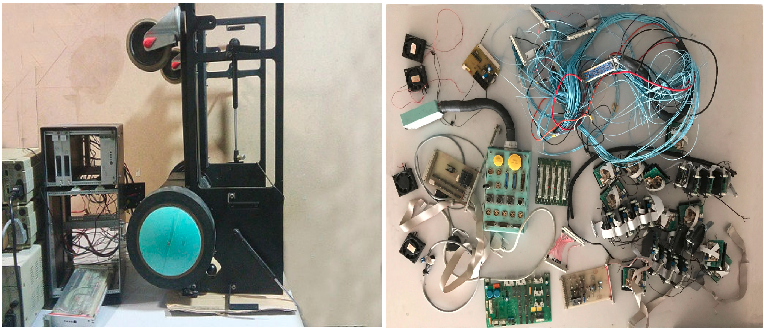
 j_mota_img2
j_mota_img2
 kinectsensor
kinectsensor
 kuka_exemple_mm
kuka_exemple_mm
 l_sarmento_img
l_sarmento_img
 laser1D_calibb
laser1D_calibb
 melodic
melodic
 miniPC
miniPC
 montagem1
montagem1
 montagem2
montagem2
 montagem3
montagem3
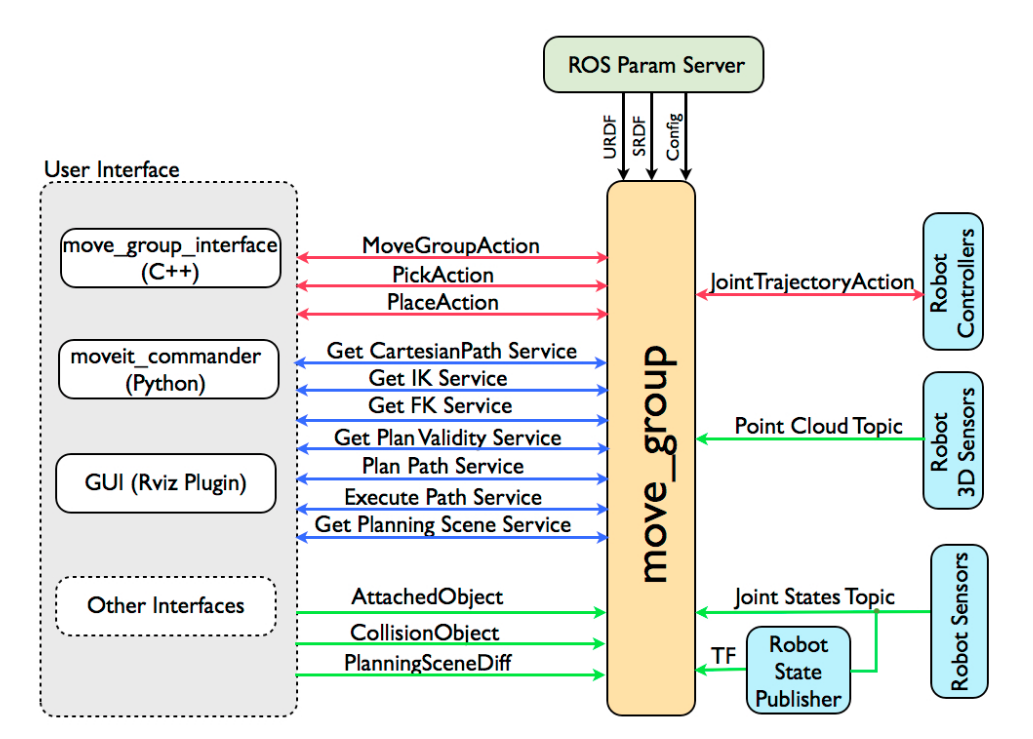 moveit_architecture
moveit_architecture
 nice
nice
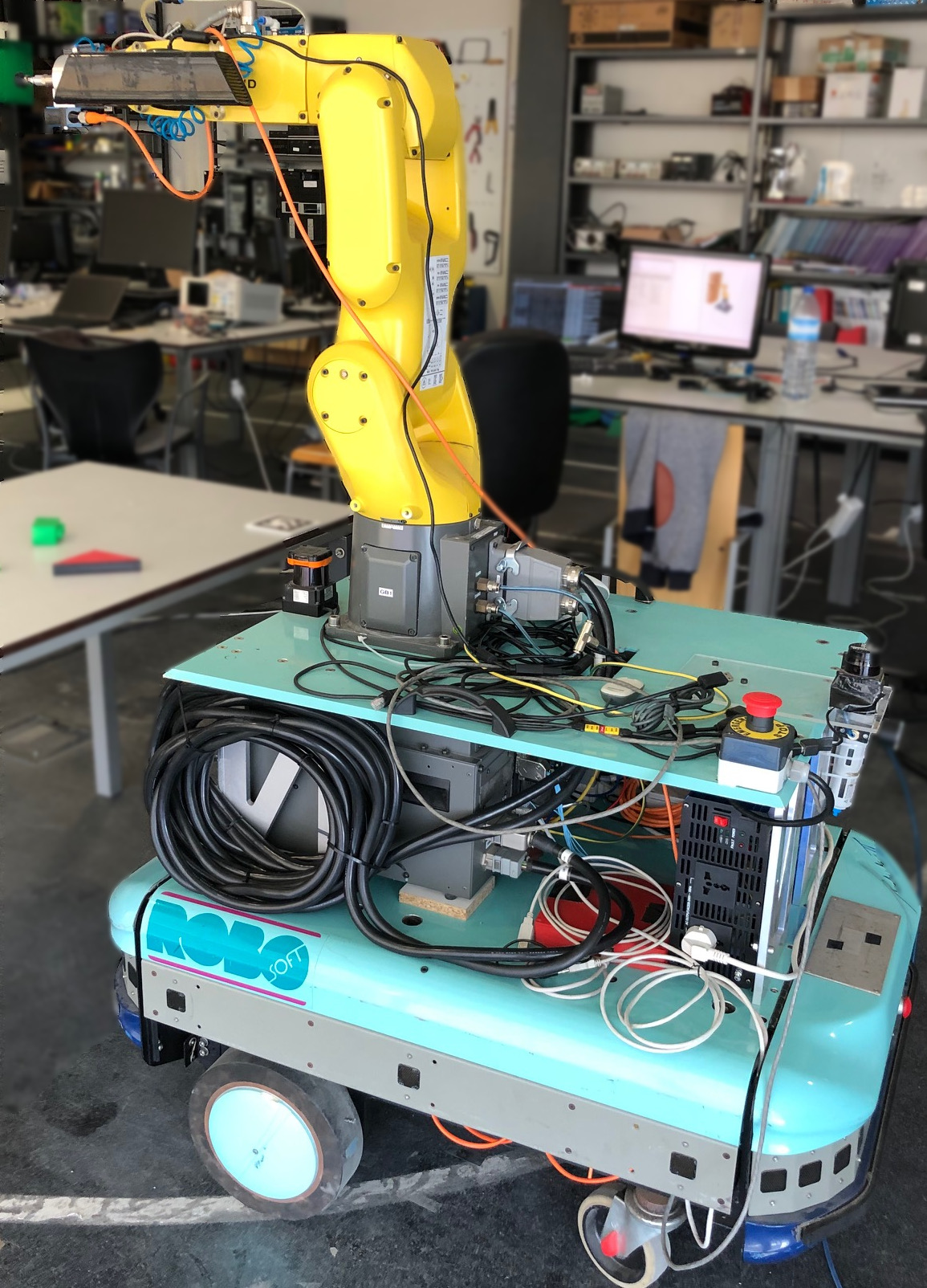
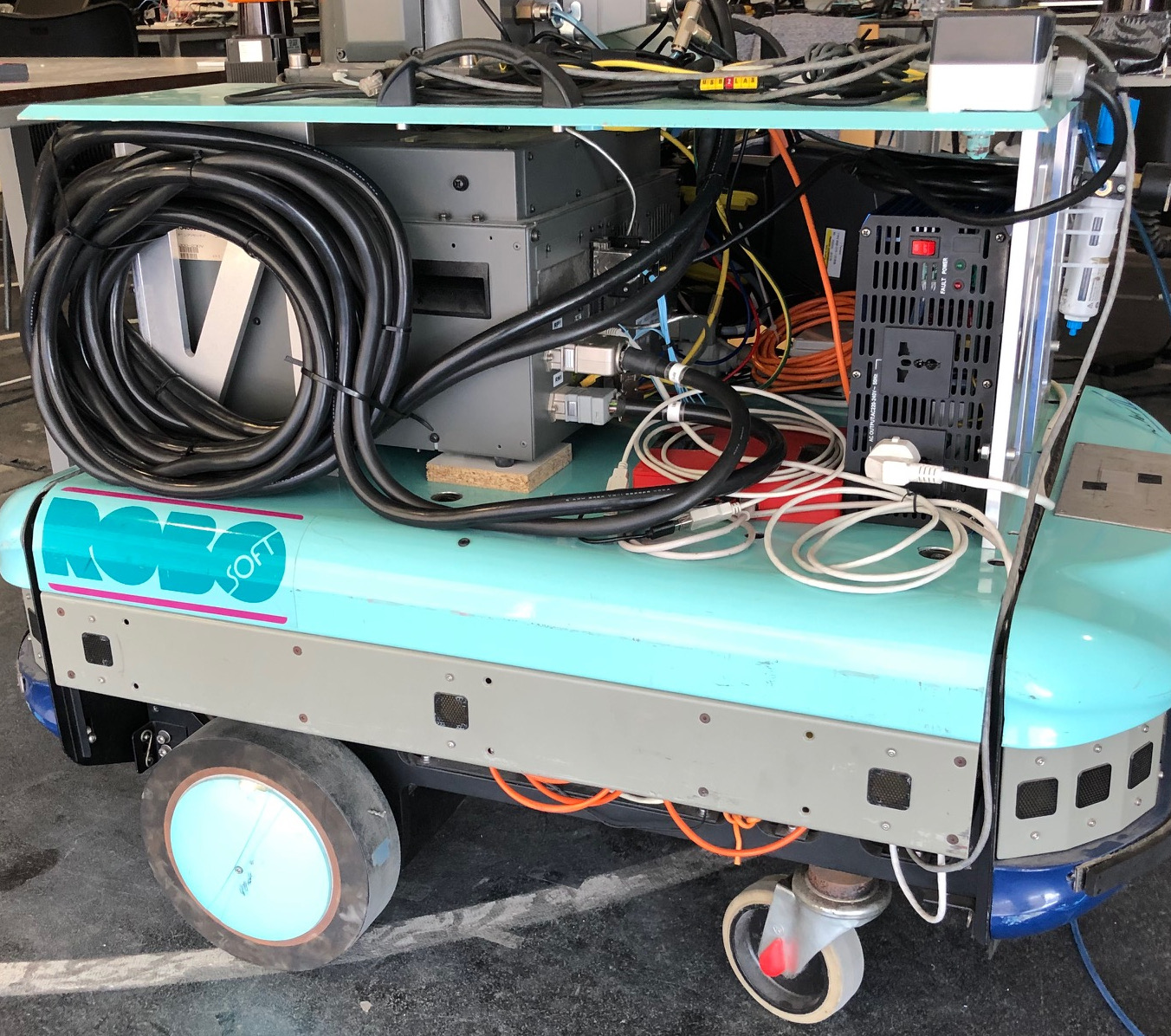
 plataforma_robonuc
plataforma_robonuc
 pos_intrinsc_calib
pos_intrinsc_calib
 pos_intrinsc_calibration_nuvem
pos_intrinsc_calibration_nuvem
 pre_intrinsc_calib
pre_intrinsc_calib
 pre_intrinsc_calibration_nuvem
pre_intrinsc_calibration_nuvem
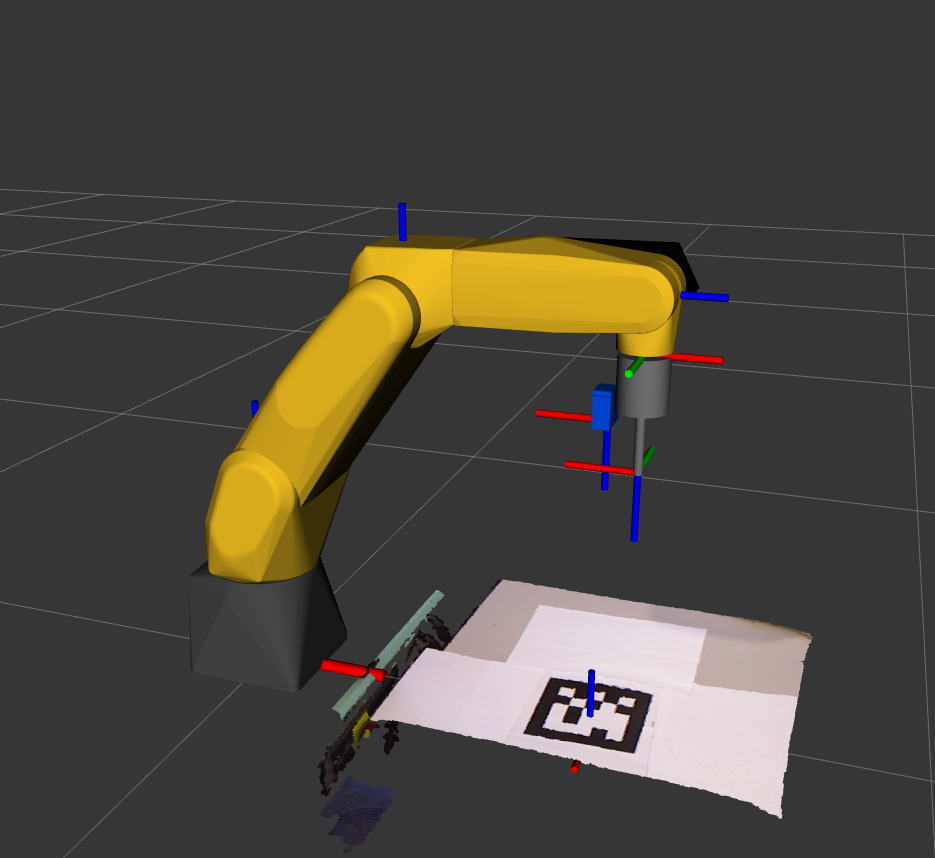 processo_extrinsc_calib
processo_extrinsc_calib
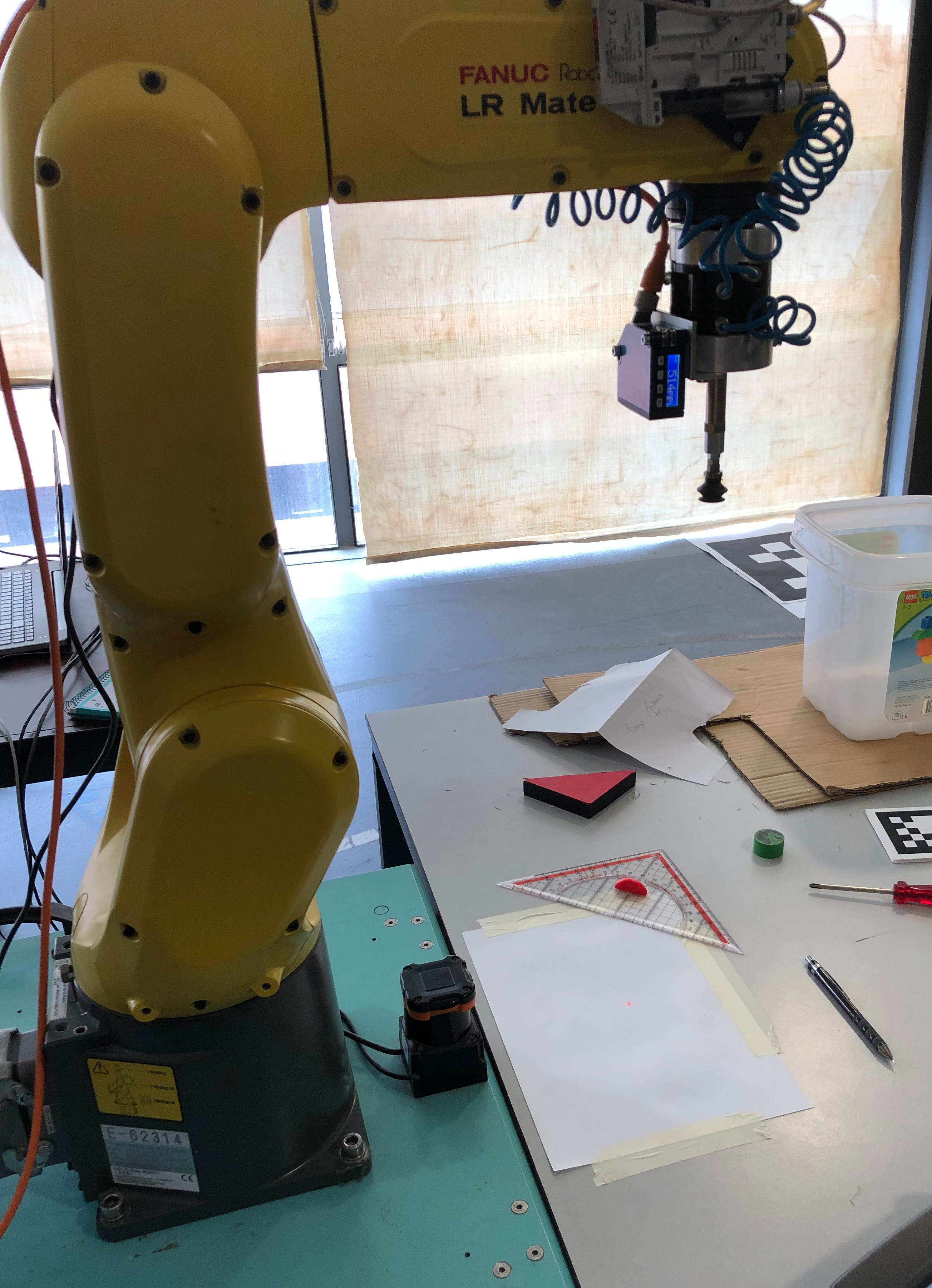
 robo_fanuc_lrmate200id
robo_fanuc_lrmate200id
 robot_pose_laser1D_calib
robot_pose_laser1D_calib
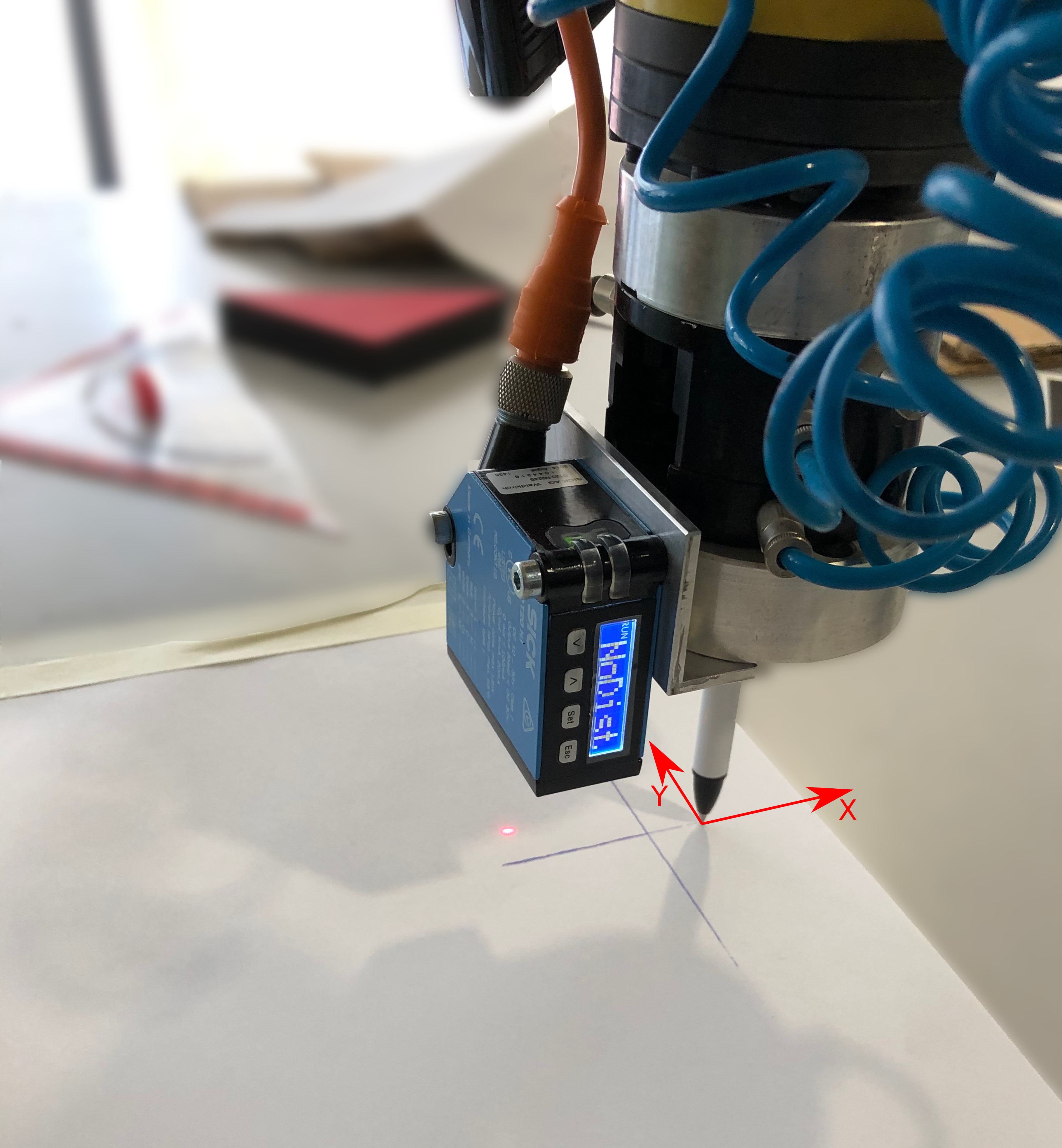
 sick_sensor_DT20HI
sick_sensor_DT20HI
 state_of_the_art_conpilation
state_of_the_art_conpilation
 tf_e_aproxpoint
tf_e_aproxpoint
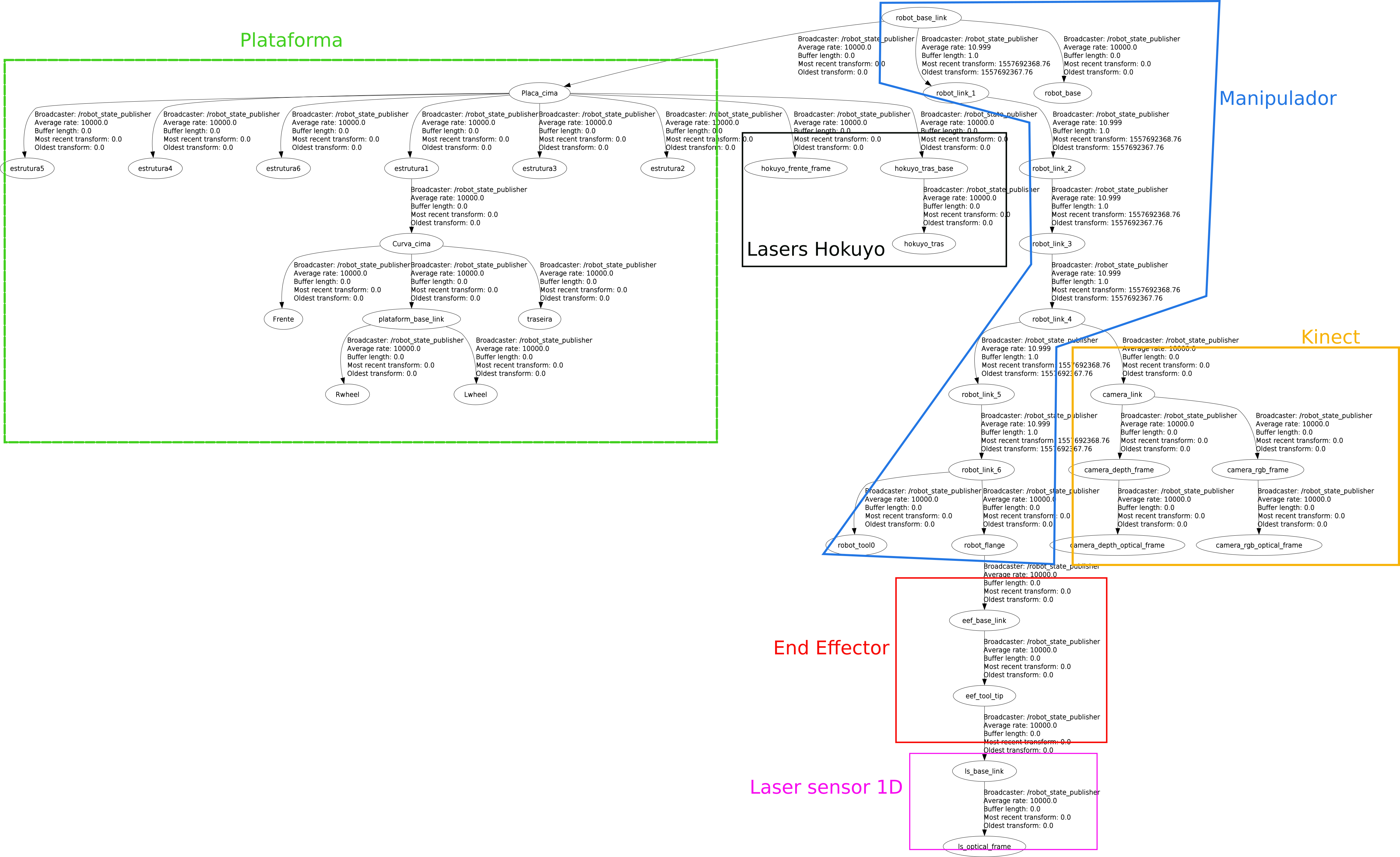 tf_tree_total
tf_tree_total
 trajetoria_navigation_auto
trajetoria_navigation_auto
 urdf_lasers
urdf_lasers
 urdf_plat_e_manipulador
urdf_plat_e_manipulador
 urdf_platform
urdf_platform
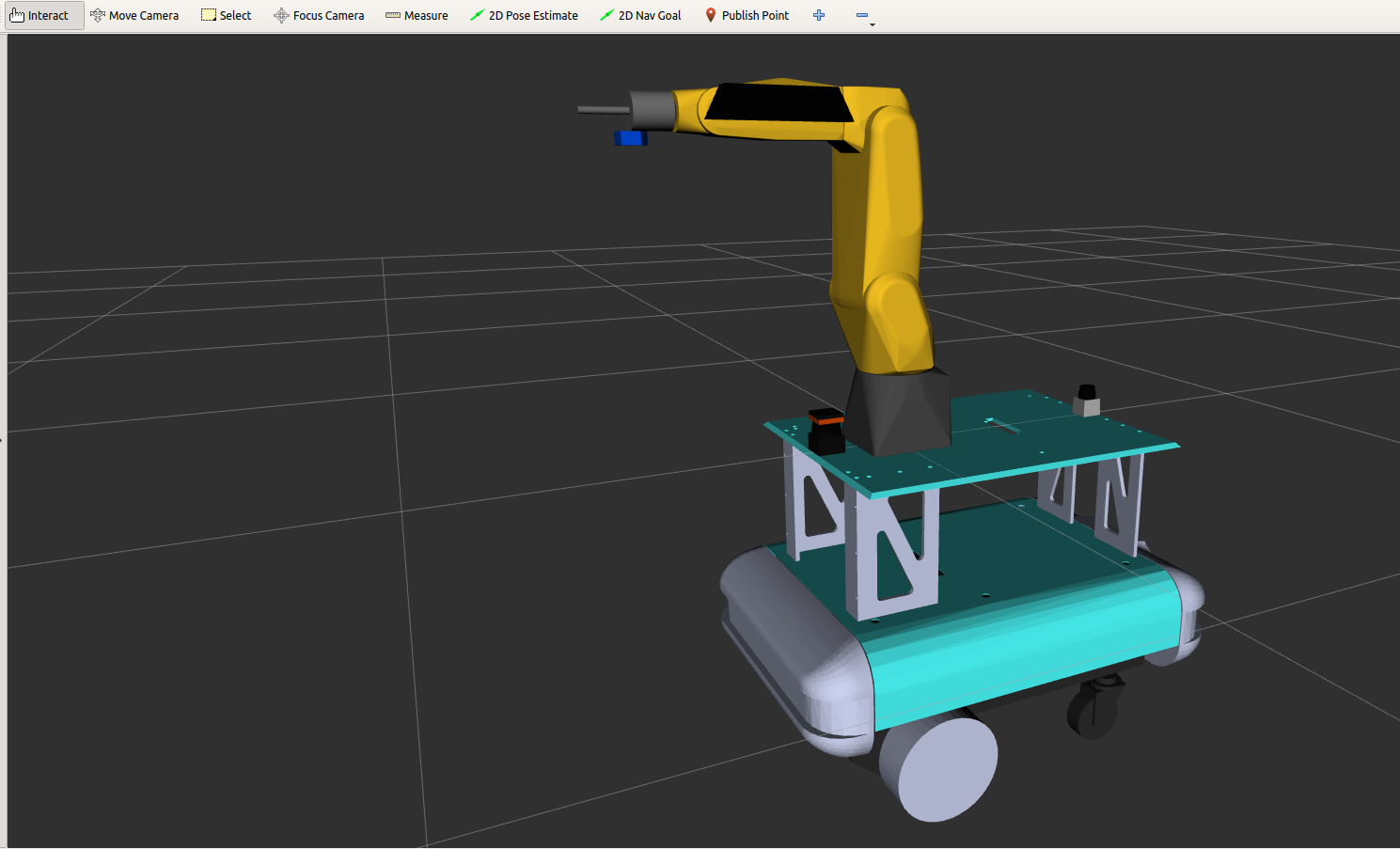 urdf_total
urdf_total
 v_vieira_compilacao
v_vieira_compilacao
 vs_compilacao
vs_compilacao
 xbox_controller
xbox_controller